怎么使用Python和OpenCV實現(xiàn)在線打乒乓球
本篇內(nèi)容介紹了“怎么使用Python和OpenCV實現(xiàn)在線打乒乓球”的有關(guān)知識,在實際案例的操作過程中,不少人都會遇到這樣的困境,接下來就讓小編帶領大家學習一下如何處理這些情況吧!希望大家仔細閱讀,能夠?qū)W有所成!
為保德等地區(qū)用戶提供了全套網(wǎng)頁設計制作服務,及保德網(wǎng)站建設行業(yè)解決方案。主營業(yè)務為網(wǎng)站設計、網(wǎng)站建設、保德網(wǎng)站設計,以傳統(tǒng)方式定制建設網(wǎng)站,并提供域名空間備案等一條龍服務,秉承以專業(yè)、用心的態(tài)度為用戶提供真誠的服務。我們深信只要達到每一位用戶的要求,就會得到認可,從而選擇與我們長期合作。這樣,我們也可以走得更遠!
捕捉屏幕
第一件事就是捕捉屏幕。我想確保我的幀速率盡可能快,為此我發(fā)現(xiàn)MSS是一個很棒的python包。有了這個,我很容易達到60幀/秒的最高速度,與 PIL 相比,我只能得到大約20幀每秒。它以 numpy 數(shù)組的形式返回。
Paddle detection
為了簡單起見,我們需要定義paddle 的位置。這可以用幾種不同的方法來完成,但我認為最明顯的是對每個Paddle的區(qū)域進行遮罩,然后運行連接的組件來找到Paddle對象。下面是一段代碼:
def get_objects_in_masked_region(img, vertices, connectivity = 8): ''':return connected components with stats in masked region [0] retval number of total labels 0 is background [1] labels image [2] stats[0] leftmostx, [1] topmosty, [2] horizontal size, [3] vertical size, [4] area [3] centroids ''' mask = np.zeros_like(img) # fill the mask cv2.fillPoly(mask, [vertices], 255) # now only show the area that is the mask mask = cv2.bitwise_and(img, mask) conn = cv2.connectedComponentsWithStats(mask, connectivity, cv2.CV_16U) return conn
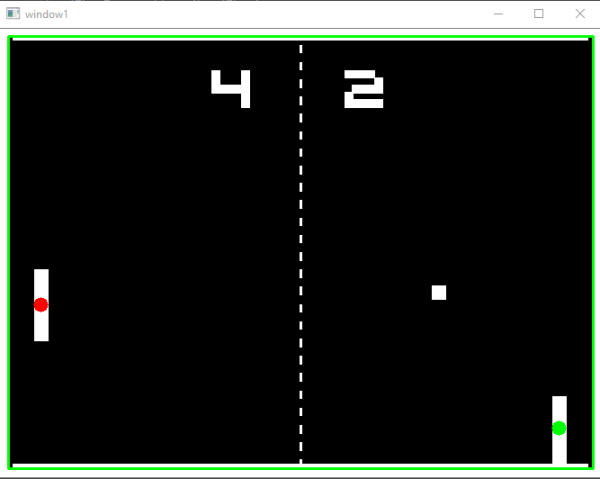
在上面,“vertices”只是定義遮罩區(qū)域的坐標列表。一旦在每個區(qū)域內(nèi)有了對象,我就可以得到它們的質(zhì)心位置或邊界框。需要注意的一點是OpenCV將背景作為任何連接的組件列表中的第0個對象,因此在本例中,我總是獲取第二大的對象。結(jié)果如下——右邊綠色質(zhì)心的球拍是玩家 / 即將成為人工智能控制的球拍。
移動paddle
現(xiàn)在我們有了輸出,我們需要一個輸入。為此,我求助于一個有用的包和其他人的代碼 。
它使用ctypes來模擬鍵盤按下,在這種情況下,游戲是用“k”和“m”鍵來玩的。我這里有掃描碼。在測試了它只是隨機上下移動后,我們就可以開始跟蹤了。
乒乓球檢測
下一步是識別并跟蹤乒乓球。同樣,這可以用幾種方法來處理——其中一種可能是通過使用模板進行對象檢測,然而,我再次使用了連接的組件和對象屬性,即乒乓球的區(qū)域,因為它是唯一具有尺寸的對象。
我知道每當乒乓球穿過或碰到其他白色物體時,我都會遇到問題,但我也認為只要我能在大多數(shù)時間里追蹤到它,這一切都沒問題。畢竟,它是直線運動的。如果你看下面的視頻,你會看到標記乒乓球的紅色圓圈是如何閃爍的。這是因為它只在每2幀中找到一個。在60幀/秒時,這并不重要。
反彈預測的光線投射
在這一點上,我們已經(jīng)有一個可工作的人工智能。如果我們只是移動球員的球拍,使其處于與乒乓球相同的y軸位置,它的效果相當不錯。然而,當乒乓球得到良好的反彈時,它確實會遇到問題。球拍太慢了,跟不上,需要預測乒乓球的位置,而不是僅僅移動到當前的位置。這已經(jīng)在上面的剪輯中實現(xiàn)了,下面是兩種方法的比較。
差別并不大,但如果選擇了正確的人工智能,這絕對是一場更穩(wěn)定的勝利。為此,我首先為乒乓球創(chuàng)建了一個位置列表。為了公平起見,我把這個列表的長度控制在5個,基本上可以做到。列表不要太長,否則要花更長的時間才能發(fā)現(xiàn)它改變了方向。在得到位置列表后,我使用簡單的矢量平均法來平滑并得到方向矢量——如綠色箭頭所示。這也被標準化成一個單位向量,然后乘以一個長度以方便可視化。
投射光線只是這個的延伸——使前向投影變長。然后我檢查了未來的位置是否在頂部和底部區(qū)域的邊界之外。如果是這樣的話,它只是將位置投影回游戲區(qū)域。對于左側(cè)和右側(cè),它計算出與paddle的x位置相交的位置,并將x和y位置固定到該點。這樣可以確保paddle指向正確的位置。如果沒有這一點,它通常會走得太遠。下面是定義光線的代碼,該光線可以預測乒乓球的未來位置:
def pong_ray(pong_pos, dir_vec, l_paddle, r_paddle, boundaries, steps = 250): future_pts_list = [] for i in range(steps): x_tmp = int(i * dir_vect[0] + pong_pos[0]) y_tmp = int(i * dir_vect[1] + pong_pos[1]) if y_tmp > boundaries[3]: #bottom y_end = int(2*boundaries[3] - y_tmp) x_end = x_tmp elif y_tmp < boundaries[2]: #top y_end = int(-1*y_tmp) x_end = x_tmp else: y_end = y_tmp ##stop where paddle can reach if x_tmp > r_paddle[0]: #right x_end = int(boundaries[1]) y_end = int(pong_pos[1] + ((boundaries[1] - pong_pos[0])/dir_vec[0])*dir_vec[1]) elif x_tmp < boundaries[0]: #left x_end = int(boundaries[0]) y_end = int(pong_pos[1] + ((boundaries[0] - pong_pos[0]) / dir_vec[0]) * dir_vec[1]) else: x_end = x_tmp end_pos = (x_end, y_end) future_pts_list.append(end_pos) return future_pts_list
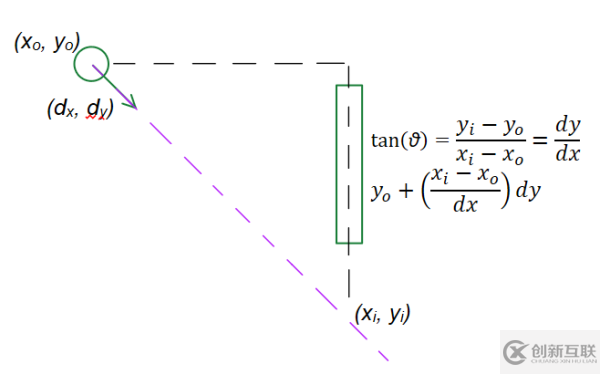
在上面,也許不太明顯的計算方法是確定paddle對目標的左或右位置的截距。我們基本上是通過相似三角形來實現(xiàn)的,圖片和方程如下所示。我們知道在邊界中給定的paddle的x位置的截距。然后我們可以計算出乒乓球?qū)⒁苿佣噙h,并將其添加到當前的y位置。
paddle雖然看起來筆直,但實際上有一個彎曲的反彈面。也就是說,如果你用球拍向兩端擊球,球會反彈,就像球拍有角度一樣。因此,我允許球拍擊中邊緣,這增加了人工智能的攻擊性,使乒乓球四處飛舞。
“怎么使用Python和OpenCV實現(xiàn)在線打乒乓球”的內(nèi)容就介紹到這里了,感謝大家的閱讀。如果想了解更多行業(yè)相關(guān)的知識可以關(guān)注創(chuàng)新互聯(lián)網(wǎng)站,小編將為大家輸出更多高質(zhì)量的實用文章!
網(wǎng)頁題目:怎么使用Python和OpenCV實現(xiàn)在線打乒乓球
URL分享:http://www.chinadenli.net/article46/gpcieg.html
成都網(wǎng)站建設公司_創(chuàng)新互聯(lián),為您提供虛擬主機、網(wǎng)站建設、響應式網(wǎng)站、標簽優(yōu)化、網(wǎng)站維護、軟件開發(fā)
聲明:本網(wǎng)站發(fā)布的內(nèi)容(圖片、視頻和文字)以用戶投稿、用戶轉(zhuǎn)載內(nèi)容為主,如果涉及侵權(quán)請盡快告知,我們將會在第一時間刪除。文章觀點不代表本網(wǎng)站立場,如需處理請聯(lián)系客服。電話:028-86922220;郵箱:631063699@qq.com。內(nèi)容未經(jīng)允許不得轉(zhuǎn)載,或轉(zhuǎn)載時需注明來源: 創(chuàng)新互聯(lián)

- 北京網(wǎng)站建設,網(wǎng)站維護需要哪些細致操作? 2021-04-14
- 你知道,小程序這5個帶客方法嗎? 2016-10-15
- 企業(yè)如何做好網(wǎng)站維護 網(wǎng)站維護的工作內(nèi)容 2016-11-11
- APP開發(fā)人員在開發(fā)APP時應注意哪些方面? 2016-08-11
- 怎么在手機上免費建網(wǎng)站 2016-10-08
- 網(wǎng)站維護和運營都做什么工作? 2016-11-01
- 網(wǎng)站維護時需要注意的細節(jié)問題 2022-05-27
- 網(wǎng)站維護建設對企業(yè)網(wǎng)站的重要性 2016-08-03
- 網(wǎng)站維護水平的提升要注重哪些方面 2022-12-19
- 上海建站公司談網(wǎng)站維護 2016-06-22
- 企業(yè)網(wǎng)站維護:從外鏈導向轉(zhuǎn)向內(nèi)容導向 2023-02-15
- 企業(yè)網(wǎng)站維護有哪些方法與技巧? 2022-09-15